Additional Information
Design & Coding
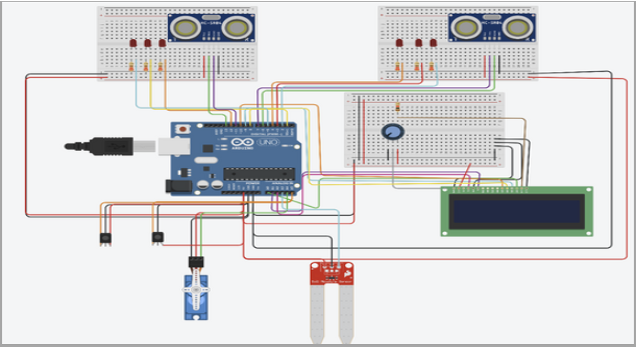
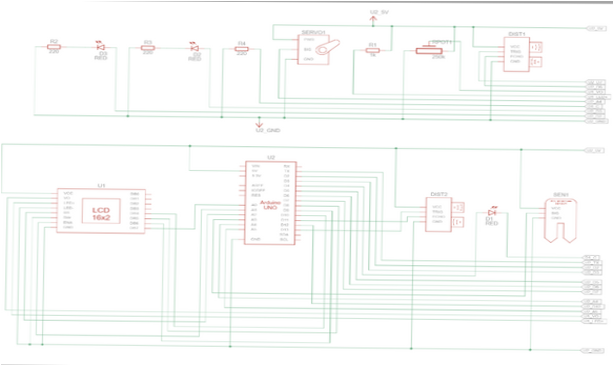
This project was simulated in Tinkercad and programmed in C++ on an Arduino Uno. The sensors this bin uses are an IR sensor, two Super Sonic sensors, and the raid detector. The IR sensor detects whether anything is on the tray, and the rain detector on the tray detects whether the trash is wet. The Super Sonic sensor monitors how full each side of the bin is; this information is sent to the displays.
The displays consist of a series of LEDs and an LCD. The LEDs are aligned on the sides of the bin in a vertical column of three. The lights are lit up based on how full the bin is and receive information from the ultrasonic sensor. The LCDs a worded message based on the input from the supersonic sensors. There is only one actuator in this system: the servo motor. This motor has two inputs: the IR sensor and the Rain. Based on these inputs, the motor will rotate to drop the trash on the wet or dry side of the bin.